Kernel 6.1 中 MS5607 温度传感器驱动深度解析
嵌入式系统中,温度传感器是硬件监控的核心组件之一,MS5607作为一款高精度的压力/温度传感器,被广泛应用在工业控制、消费电子等场景。本文基于Linux Kernel 6.1版本,深入解析drivers/input/sensors/temperature/tmp_ms5607.c驱动代码的实现逻辑,带你搞懂传感器驱动的注册、初始化、数据采集与上报全流程,以及如何在系统中获取传感器的状态和数据。
一、MS5607传感器基础
MS5607是MEAS(TE Connectivity)推出的高精度数字压力传感器,集成温度传感功能,采用I2C接口通信,内置128位校准数据(PROM)。驱动通过读取校准数据补偿温度和压力的测量误差,最终输出-40~85℃范围内的高精度温度值,以及对应的压力值。
二、驱动代码核心结构解析
驱动代码基于LinuxI2C子系统和Input子系统实现,整体结构分为「驱动注册」「核心操作函数」「数据采集与上报」三大模块,下面逐一拆解。
2.1驱动注册:I2C驱动框架
Linux下I2C设备驱动遵循标准的I2C驱动框架,核心是i2c_driver结构体和设备ID表,这是驱动被内核识别的基础:
// 设备ID表:匹配I2C设备staticconststructi2c_device_id temperature_ms5607_id[] = { {"tmp_ms5607", TEMPERATURE_ID_MS5607}, {}};// I2C驱动核心结构体staticstructi2c_driver temperature_ms5607_driver = { .probe = temperature_ms5607_probe, // 设备匹配成功后执行 .remove= (void*)temperature_ms5607_remove,// 设备卸载时执行 .shutdown = sensor_shutdown, .id_table = temperature_ms5607_id, // 设备ID匹配表 .driver = { .name ="temperature_ms5607", #ifdef CONFIG_PM .pm = &sensor_pm_ops, // 电源管理 #endif },};// 简化I2C驱动注册/注销的宏module_i2c_driver(temperature_ms5607_driver);
•module_i2c_driver:底层调用i2c_add_driver完成驱动注册,无需手动写init/exit函数;
•probe函数:I2C设备匹配成功后触发,调用sensor_register_device完成传感器设备注册;
•remove函数:设备卸载时注销传感器设备,释放资源。
2.2核心操作函数:初始化与激活
驱动通过sensor_operate结构体封装传感器的核心操作(初始化、激活、数据上报),核心函数如下:
(1)sensor_init:传感器初始化
初始化的核心目标是将传感器置为「关闭状态」,为后续激活做准备:
staticintsensor_init(structi2c_client *client){ structsensor_private_data *sensor = (structsensor_private_data *) i2c_get_clientdata(client); intresult =0; // 先禁用传感器,确保初始状态为OFF result = sensor->ops->active(client,0,0); if(result) { printk("%s:line=%d,errorn",__func__,__LINE__); returnresult; } sensor->status_cur = SENSOR_OFF; // 标记当前状态为OFF g_ms5607_temp_status = sensor->status_cur;// 同步到全局状态变量 returnresult;}
(2)sensor_active:传感器激活与校准数据读取
激活是传感器从「OFF→ON」的关键步骤,核心是读取校准数据(PROM),这是温度补偿的基础:
staticintsensor_active(structi2c_client *client,intenable,intrate){ intresult =0; inti =0; charprom[16]; // 仅当「启用传感器」且「当前为OFF」时执行激活逻辑 if((enable)&&(g_ms5607_pr_status == SENSOR_OFF)) { // 1. 发送复位指令,重置传感器 result =sensor_write_reg_normal(client, CMD_RESET); if(result) printk("%s:line=%d,errorn",__func__,__LINE__); // 2. 读取128位校准数据(8组,每组2字节) memset(prom,0,16); for(i=0; i<8; i++) { prom[i*2]= CMD_PROM_RD + i*2; // 校准数据读取指令 result = sensor_rx_data(client, &prom[i*2], 2); if(result) return result; } // 3. 校准数据转存到全局数组C,供后续温度计算使用 for (i=0;i<8;i++) { C[i] = prom[2*i] << 8 | prom[2*i + 1]; } } g_ms5607_temp_status = enable; // 更新全局激活状态 return result;}
关键说明:MS5607的校准数据(PROM)是出厂时写入的,包含8组补偿参数,决定了温度测量的精度,必须在激活阶段读取并保存。
2.3数据采集与上报:温度计算+Input子系统
sensor_report_value是驱动的核心数据处理函数,负责「触发AD转换→读取数据→温度补偿→上报数据」全流程:
staticintsensor_report_value(structi2c_client *client){ // 省略变量定义... if(g_ms5607_pr_status == SENSOR_OFF) { // 1. 触发压力(D1)AD转换(4096倍过采样,平衡精度/速度) sensor_write_reg_normal(client, CMD_ADC_CONV+CMD_ADC_D1+CMD_ADC_4096); msleep(10);// 等待转换完成 result = sensor_rx_data(client, &buffer[0],3); D1 = (buffer[0] << 16) | (buffer[1] << 8) | buffer[2]; // 2. 触发温度(D2)AD转换 sensor_write_reg_normal(client, CMD_ADC_CONV + CMD_ADC_D2 + CMD_ADC_4096); msleep(10); result = sensor_rx_data(client, &buffer[0], 3); D2 = (buffer[0] << 16) | (buffer[1] << 8) | buffer[2]; // 3. 基础温度计算(补偿算法) dT = D2 - ((unsigned int)C[5] << 8); g_ms5607_temp = (int)(2000 + ((long long)dT * C[6] >>23)); // 4. 二阶补偿(低温场景<20℃,提升精度) if (g_ms5607_temp < 2000) { int tmp = (g_ms5607_temp - 2000) * (g_ms5607_temp - 2000); T2 = (int)((long long)(dT * dT) >>31); OFF2 = (((longlong)tmp *61)*((longlong)tmp *61)) >>4; SENS2 = (longlong)((tmp*tmp) << 1);
if (g_ms5607_temp < -1500) { // 超低温额外补偿 tmp = (g_ms5607_temp + 1500) * (g_ms5607_temp + 1500); OFF2 += 15 * tmp; SENS2 += 8 * tmp; } g_ms5607_temp -= T2; // 最终温度值 } // 5. 通过Input子系统上报温度数据 temperature_report_value(sensor->input_dev, g_ms5607_temp); } // 省略其他逻辑... returnresult;}
核心细节:
•AD过采样配置:代码中使用CMD_ADC_4096(4096倍过采样),也可切换为256/512/1024倍,过采样率越高,精度越高但功耗/耗时越大;
•温度单位:g_ms5607_temp的单位是0.01℃(如2500代表25.00℃);
•Input上报:通过input_report_abs上报ABS_THROTTLE类型数据,input_sync同步数据,用户态可通过Input节点读取。
三、驱动在系统中的体现
MS5607驱动依托Linux内核子系统实现,在系统中的体现可分为「驱动加载」「设备注册」「数据流转」三个层面,以下是核心流程可视化:
3.1驱动加载流程图

3.2系统层面的关键体现
1.驱动加载状态:
○查看已加载的I2C驱动:
cat /sys/bus/i2c/drivers/temperature_ms5607/;
○查看驱动日志:dmesg | grep tmp_ms5607,可排查初始化/激活错误。
2.Input子系统节点:
驱动通过Input子系统上报数据,系统会生成/dev/input/eventX节点(X为设备号),可通过以下命令查看设备信息:
cat/proc/bus/input/devices | grep -A 5 tmp_ms5607
3.全局状态变量:
驱动通过g_ms5607_temp_status(激活状态:0=OFF/1=ON)、g_ms5607_temp(温度值)维护核心状态,内核态可直接访问。
四、如何获取传感器状态与数据
4.1内核态获取
1.调试打印:开启CONFIG_PR_MS5607后,驱动会打印温度/压力值,通过dmesg查看:
dmesg| grep sensor_report_value# 输出示例:sensor_report_value:pressure=101325,temperature=2500
2.全局变量引用:其他内核模块可通过extern引用全局变量:
externintg_ms5607_temp; // 温度值(0.01℃)externintg_ms5607_temp_status;// 激活状态printk("MS5607 Temp: %.2f℃, Status: %dn", g_ms5607_temp/100.0, g_ms5607_temp_status);
4.2用户态获取
方式1:读取Input事件(原生方式)
编写简单的C程序读取/dev/input/eventX节点:
#include#include #include intmain(){ intfd =open("/dev/input/eventX", O_RDONLY);// 替换为实际的eventX structinput_eventev; while(read(fd, &ev,sizeof(ev)) >0) { // 过滤温度事件(ABS_THROTTLE类型) if(ev.type == EV_ABS && ev.code == ABS_THROTTLE) { printf("MS5607 Temperature: %.2f℃n", ev.value /100.0); } } close(fd); return0;}
方式2:扩展sysfs节点
原驱动未暴露sysfs节点,可扩展代码添加,简化用户态读取:
// 1. 定义sysfs属性读取函数staticssize_ttemp_show(structdevice *dev,structdevice_attribute *attr,char*buf){ returnsprintf(buf,"%.2fn", g_ms5607_temp /100.0);}staticDEVICE_ATTR(temp, S_IRUGO, temp_show,NULL);// 只读权限// 2. 在probe函数中创建sysfs节点staticinttemperature_ms5607_probe(structi2c_client *client,conststructi2c_device_id *devid){ intret =sensor_register_device(client,NULL, devid, &temperature_ms5607_ops); if(!ret) { device_create_file(&client->dev, &dev_attr_temp);// 创建temp节点 } returnret;}
添加后,用户态可直接读取:
cat/sys/bus/i2c/devices/0-0048/temp# 替换为实际的I2C设备地址# 输出示例:25.00
五、核心流程脑图
六、总结与拓展
MS5607驱动是典型的「I2C设备+Input子系统」传感器驱动实现,核心设计思路可总结为:
1.遵循内核框架:基于I2C驱动框架完成设备匹配,基于Input子系统完成数据上报;
2.校准是核心:必须读取PROM校准数据,才能通过补偿算法得到高精度温度;
3.分层设计:将初始化、激活、上报封装为独立函数,符合Linux驱动的模块化思想。
拓展优化方向
•内核版本适配:Kernel 6.1后I2C/Input子系统接口可能微调,需验证兼容性;
•功耗优化:结合PM子系统,在休眠时关闭传感器AD转换,降低功耗;
•功能扩展:添加阈值中断、sysfs节点配置采样率等功能;
•精度调优:根据场景切换AD过采样率(如低功耗场景用256倍)。
审核编辑 黄宇
猜你喜欢
2026年适用电力工程各环节的六氟化硫气体检测仪品牌推荐

在电力、半导体及精密制造行业,六氟化硫因其优异的绝缘与灭弧性能被广泛应用,但其强温室效应潜值使得对泄漏的高精度监测成为安全生产与环保合规的核心环节。选择一款可靠的六氟化硫检测仪,直接关系到电网设备的运行安全、企业的运营成本与社会责任履行。...
Tag:传感器静力水准仪中应用倾角芯片是为什么?

基于CW32的BLDC控制应用实例分析——换向检测电路和其他功能性电路
存算一体架构赋能AI眼镜革新:S300芯片定义多模态智能终端新思路

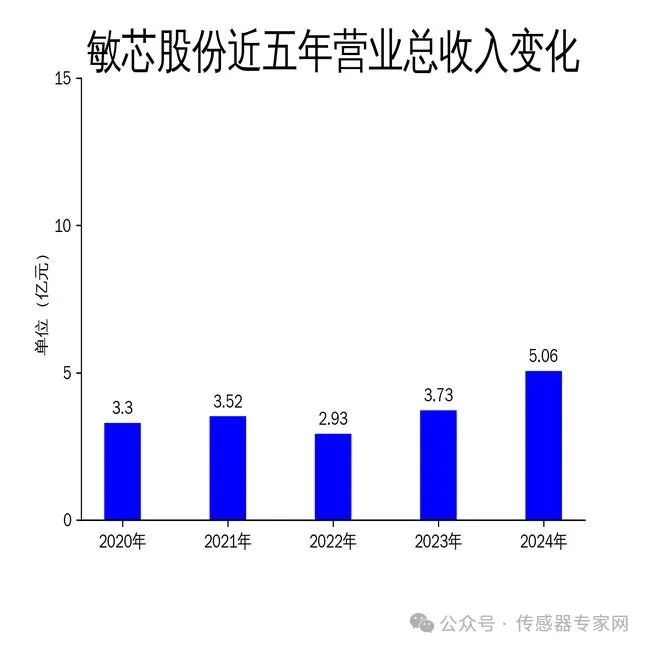
敏芯股份2024年财报:营收增长35.71%,净利润仍亏损,压力传感器成新亮点