
基于CW32的BLDC控制应用实例分析——换向检测电路和其他功能性电路
为获得转子当前位置,系统需要采用某种转子位置检测环节。在有位置传感器的系统中,转子位置的检测是通过霍尔传感器(HALL)来实现的,霍尔传感器能够感知转子永磁磁极的位置。
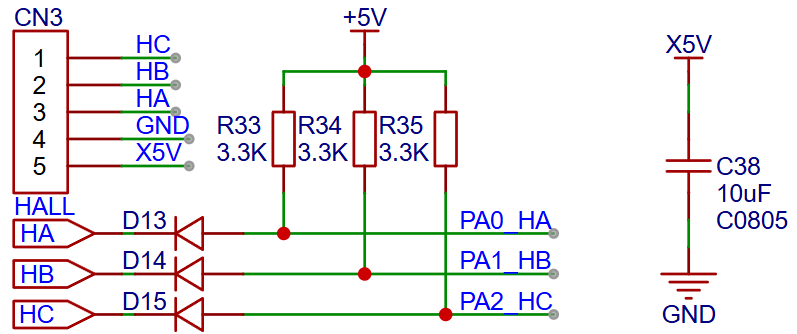
霍尔传感器需要电源。电压范围可以是4V到24V(一般为5V)。所需电流范围为5mA至15mA。设计控制器时,请参见相对应的电机的技术规范,了解霍尔传感器所用的精确电压和电流范围。霍尔传感器的输出通常采用集电极开路类型。控制器端需要上拉电阻。
对于无位置传感器的设计,则是通过检测磁极何时从非导通相绕组下通过来获取转子位置信息。在每一个换相周期中,将有一相绕组处于不导通状态,因此可检测到转子磁极从在该绕组经过的时刻。本设计以CW32L011的ADC同步触发过零采样比较为核心,通过反电势电压与VBUS电压比较得到过零点的方法,来实现位置检测。整个反电动势过零点检测的电路如下图所示,主要功能依赖于MCU的ADC性能实现:
各接口电路设计:
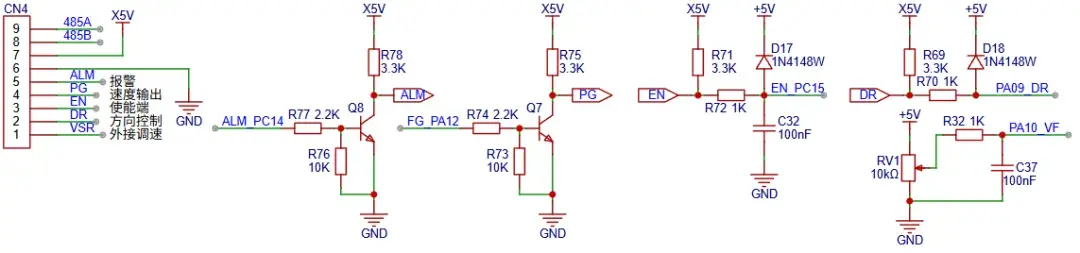
DR:电机运转方向控制
正反转方向控制端口。端口控制模式时,悬空或高电平时为正转,低电平反转。此信号需有5mA以上驱动吸收能力。
外部接线如下图所示。
当K合上(DR为低电平),电机方向切换为反转。当K断开(DR为高电平),电机方向为正转。
EN:使能信号。悬空时运行,接GND时停止运行
用户可通过控制驱动器EN端子来控制电机的起动或停止(或刹车)。此信号需有5mA以上驱动吸收能力。
外部接线如下图所示。
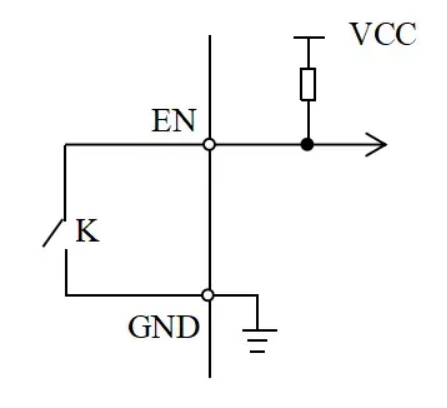
当K合上(EN为低电平),电机停止运行。当K断开(EN为高电平),电机启动运行。
PG:电机转速反馈输出
速度反馈信号。 此信号与电机转速成正比,PG频率与霍尔换相频率正成比。
ALM:预留报警、故障信号输出接口
RV1:为板载电位器调速

VE(VSR):外部调速信号输入
外接调速信号输入。
支持外接10K电位器或模拟电压调速。当外接电位器时,VE对应电位器中间脚,5V、GND对应连接电位器的两边脚。电路设计使用LMV321做跟随器。
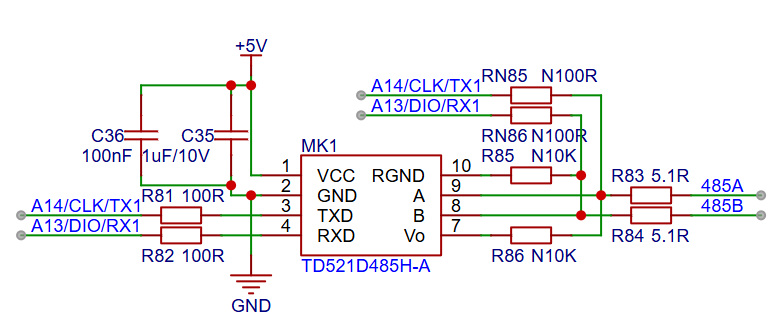
485A,485B:预留485或串口通讯接口,工业485设计,使用专门模块,提升可靠性与可用性。
猜你喜欢
华瑞股份:公司专注于从事小功率电机和微特电机换向器的研发、设计、生产和销售
新能源电机台架环境试验箱解决方案——广东贝尔助力电驱系统全工况精准测试
其利天下亮相第22届顺德家电研讨会,单电阻采样技术赋能吊扇行业新升级

新手买电瓶车选什么品牌?这几个值得考虑

青智8962A1功率分析仪电机堵转测试方案
