
机器人通信协议EtherCAT和CAN如何选择
以下文章来源于机器人开发圈,作者付斌
当下,虽然行业中存在许多通信协议,但业内人士普遍认为,EtherCAT和CAN两大协议,是机器人行业未来最重要的两大协议。
越来越被重视的EtherCAT
据EtherCAT技术组织(ETG)2024年统计,EtherCAT已占据全球工业机器人通信协议市场39.2%的份额,年增长率达12.7%,表现远超其他同类协议。在关键应用场景中,EtherCAT的优势尤为明显:无论是人形机器人的多关节实时协同控制、自动驾驶的多传感器融合,还是工业4.0中的人机协作,它都在重新定义智能体与物理世界交互的方式。
EtherCAT是机器人关节主流通讯方式之一,在工业机器人、人形机器人关节控制中广泛应用。比如说,库卡、发那科等主流机器人厂商广泛采用EtherCAT作为控制总线,以实现焊接、搬运、喷涂等复杂作业。
EtherCAT适用于对实时性要求高的场景:机器人关节的电流环、速度环、位置环三环控制,需快速完成“信号采集-运算处理-输出”闭环流程。
支持机器人全身统一通讯架构,部分场景也会与CAN搭配,如机器人上半身走EtherCAT,下半身走CAN。
EtherCAT(Ethernet for Control Automation Technology)总线由德国倍福自动化有限公司在2003年首次提出,它是一种基于以太网的现场总线技术。诞生之初,工业界急需一种高速、高效且低成本的通信解决方案,EtherCAT应运而生,凭借其突破传统以太网在工业自动化应用局限的特点,迅速获得关注。它的最大特点是数据传输速度极快,能够实现纳秒级的同步精度。
EtherCAT仅使用了物理层、链路层、应用层三层协议,与多数传统的现场总线相同,但相比于其它实时以太网协议,如PROFINET、EtherNet/IP等,其协议栈更加精简。因此它具备超高速的数据传输能力,能够在极短时间内完成大量数据的交换,满足机器人实时控制需求,使机器人可以快速响应指令,实现高精度的运动控制。其分布式时钟技术可确保网络中所有设备的时钟精确同步,让机器人各关节动作协调一致,避免因时间偏差导致的运动误差。
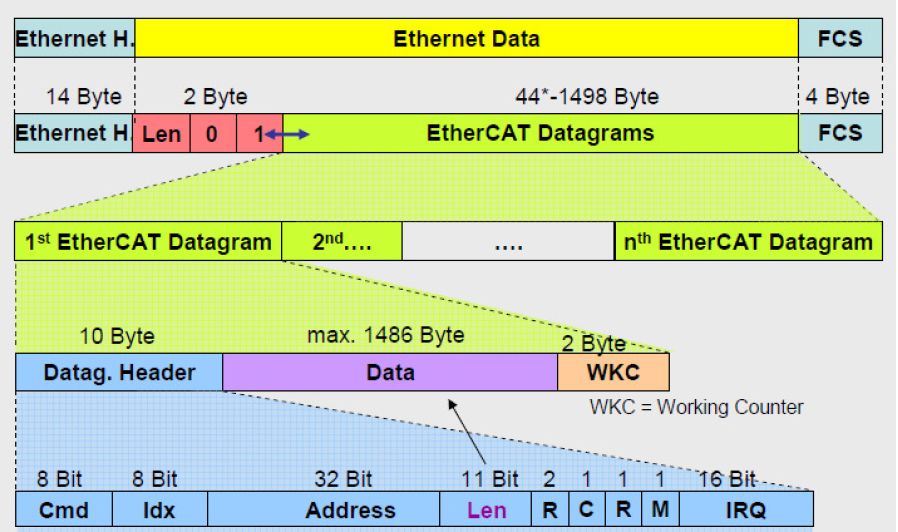
On-the-Fly/Processing on the Fly(飞行处理)是EtherCAT技术的护城河。有工程师表示,这个特性目前只在EtherCAT上见到了,而且不基于IP协议。该机制是其高性能的核心设计,允许从站在不存储完整报文的情况下,直接读取或写入数据实现微秒级实时通信。
与传统以太网协议不同,数据帧无需存储转发,从站设备在数据经过时直接读取或写入数据段,单帧处理延迟仅为1μs。技术实现主要包括:
分布式时钟同步:基于主从站时钟偏移补偿算法,实现全网络节点时间同步误差低于100 ns(遵循IEEE 1588增强标准);
数据帧结构优化:采用8字节紧凑型帧头,数据负载率可达98%(高于PROFINET的60%),显著提升带宽利用率。
从性能和安全的角度,EtherCAT很强,但占据主导的另一个主要原因在于开放。
从工程师角度来看,EtherCAT使用起来可能不如CAN友好,不过对运动控制,有要求的场景,EtherCAT协议最有性价比。
目前,MCU厂商对于EtherCAT的重视程度非常高。
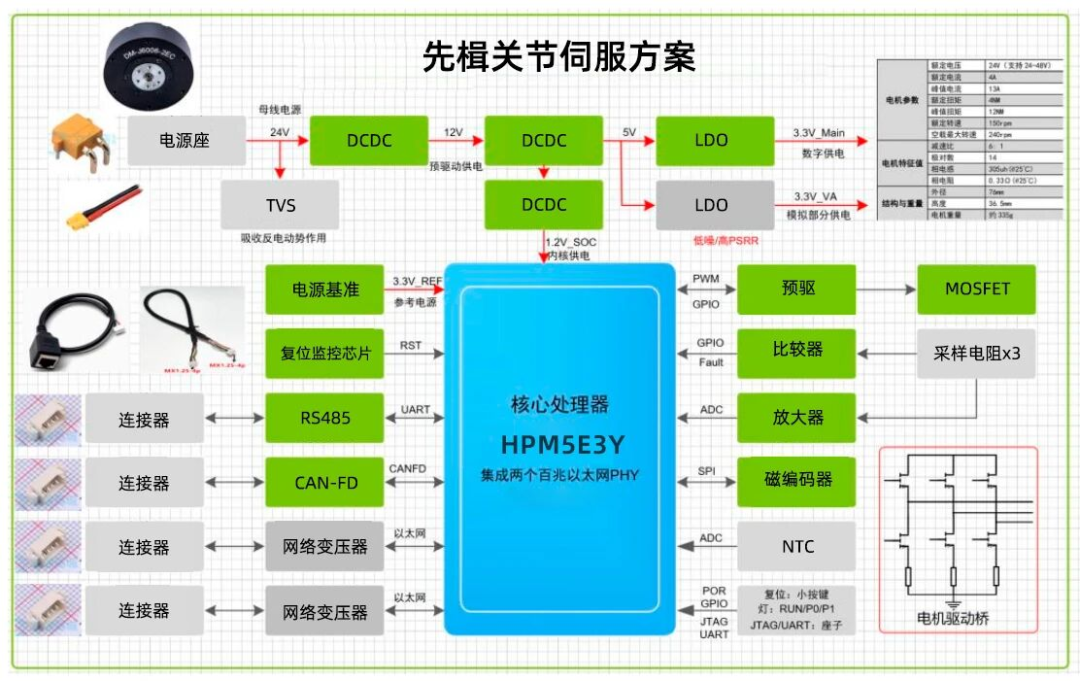
早在2023年12月,先楫就对外宣布,推出中国首款拥有德国倍福公司(Beckhoff)正式授权EtherCAT从站控制器(ESC, EtherCAT Slave Controller)的高性能MCU产品HPM6E00系列。而后针对机器人推出HPM6E8Y。在CES 2026上,先楫又发布机器人关节专用的高性能MCU HPM5E3Y,内置EtherCAT从站控制器和2个以太网PHY收发器,RISV-V内核主频达480MHz,内置512KB RAM和1MB Flash闪存,同时体积非常小,最小封装只有9×9毫米,非常匹配机器人关节空间有限、设计紧凑的要求。HPM5E3Y与HPM6E8Y兼容互补,构建全球最完整的机器人关节MCU系列。

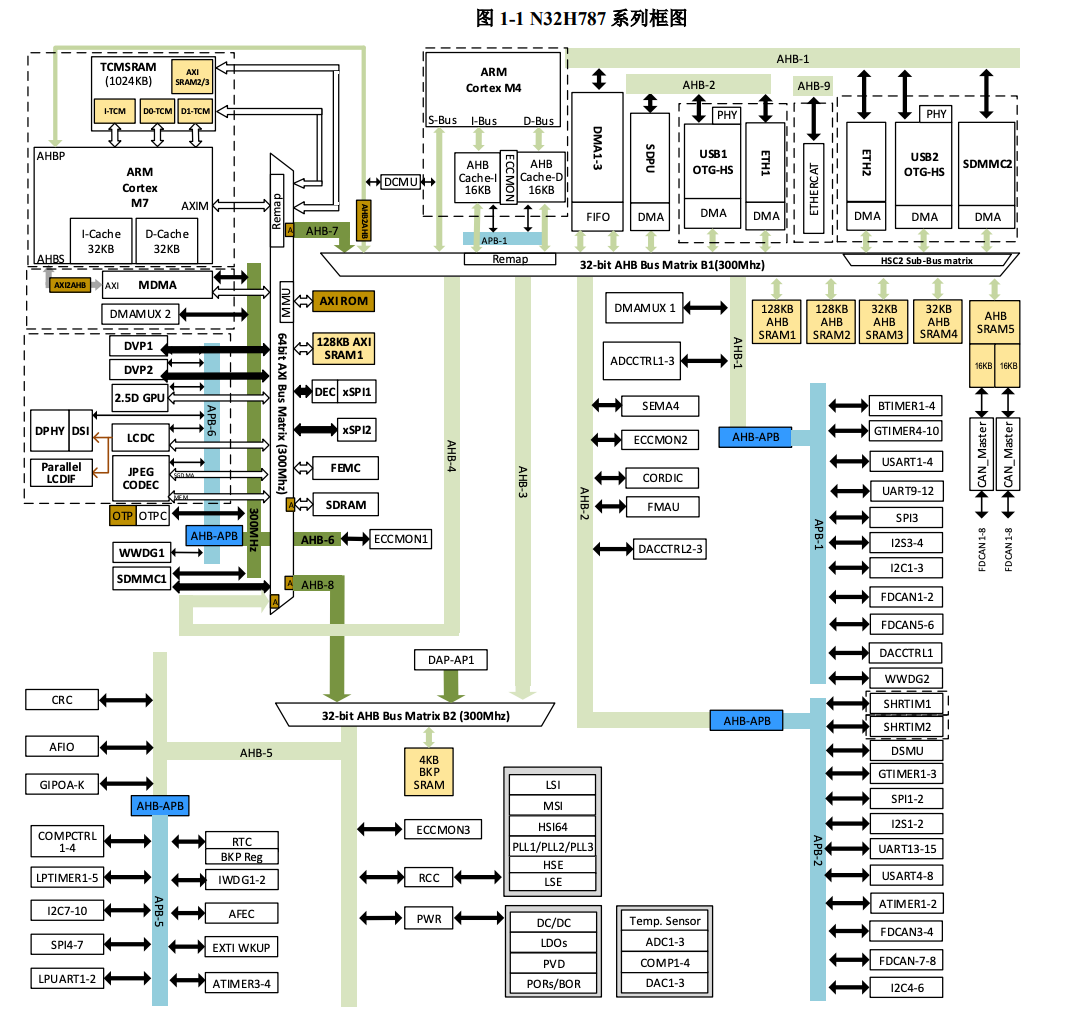
国民技术非常关注EtherCAT在机器人上的趋势。2025年慕尼黑期间,国民技术发布国内首款M7+M4双核异构的N32H785、N32GH785EC、N32H787、N32H788四大系列高性能MCU,以及M7内核的N32H760、N32H762、N32H765、N32H765EC四大系列高性能MCU,其中N32H788EC与N32H765EC系列集成EtherCAT从站控制器,是国内首个晶圆级集成倍福官方授权EtherCAT从站控制器。
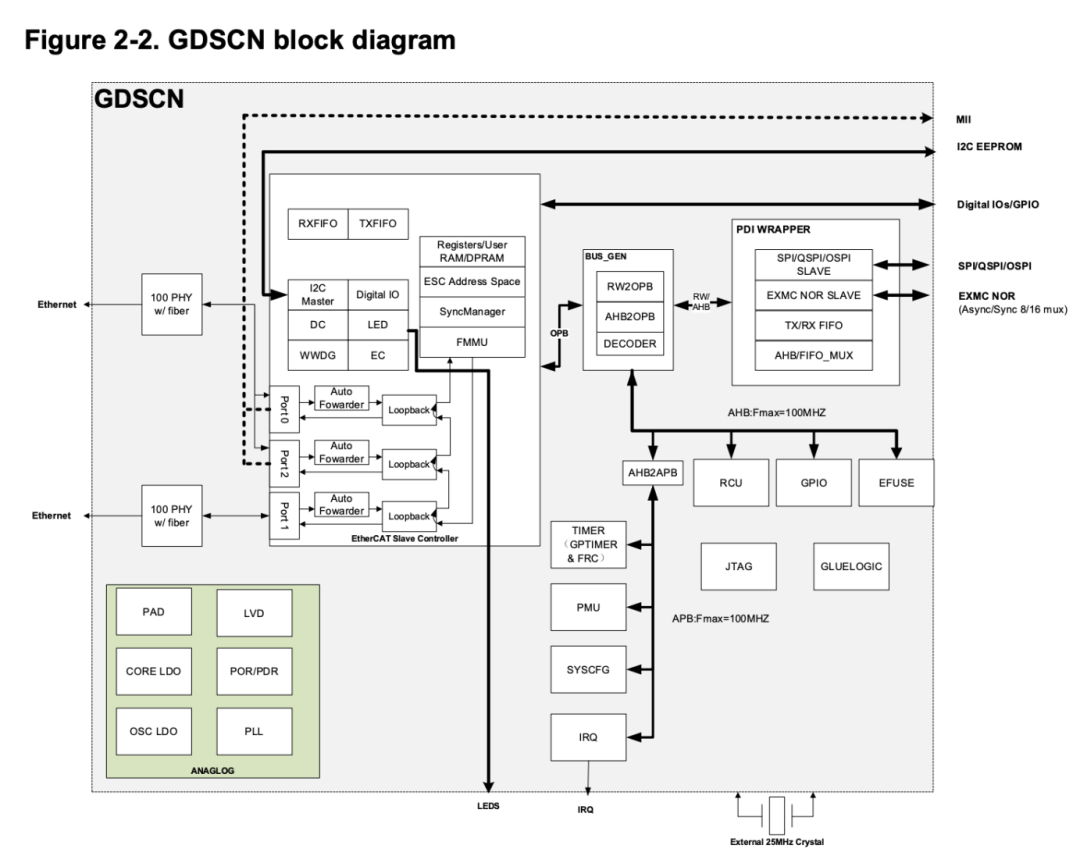
兆易创新也非常关注EtherCAT在机器人上的趋势。2025年9月,兆易创新推出两款芯片——GDSCN832系列EtherCAT从站控制器产品以及GD32H75E系列超高性能工业互联MCU产品。EtherCAT从站控制芯片GDSCN832集成2个内部PHY和1个MII扩展接口,内置双通道集成Ethernet物理层设备,每个通道均提供全双工100BASE-TX收发器,支持100Mbps运行。GD32H75E集成了EtherCAT IP,使其内置ESC子系统以及一系列高性能外设资源,如3x CAN-FD、2x USB、高性能数字滤波器HPDF、EDOUT、14bit ADC、12bit DAC、比较器等。

CAN也是绕不开的大山
CAN(以及其更适用于运动控制的变种CANopen)是机器人另一主流通讯方案,尤其适用于对实时性要求稍低的场景,如机器人下半身、轮式机器人驱动。
随着EtherCAT成本下降,CAN的应用场景有所压缩,但在关节数量少、控制频率低的机器人如四足机器人、机器狗中仍广泛使用;同时,CAN在人形机器人中仍然不可或缺,比如智元灵犀X1采用100Mbps EtherCAT 1KHZ实时通信转发、EtherCAT转3路CANFD数据域(波特率达5Mbps)。
CAN支持多网段划分。如果机器人全身若有40多个关节,可按肢体(胳膊、腿)分成多个CAN FD网段,避免总线仲裁导致的延迟与丢包。
CAN总线最初为汽车电子设计,核心设计强调可靠性与抗干扰能力。其采用“载波监听多路访问/非破坏性仲裁”(CSMA/CA)机制,允许多个节点在总线空闲时主动发送数据。若发生冲突,优先级高的报文(ID值较小)可继续传输,优先级低的则自动延迟发送,实现无数据损毁的仲裁。
这一机制支持分布式决策,具备高可靠性,适用于传递开关量、传感器数据等非周期性信息,因此在汽车电子控制单元(ECU)间通信中应用广泛。然而,当CAN总线应用于对实时性与周期性要求极高的多轴协同运动控制场景时,其固有局限便显现出来。
从CAN和EtherCAT选择上看,CAN多在已有CAN总线架构的系统中进行扩展,对于轴数较少(如6轴以下)、同步与动态性能要求不极致的桌面机器人、AGV等,CAN足够且经济,同时在极端环境下具有公认的鲁棒性。而EtherCAT则适合在高性能或者大规模分布式的机器人系统,虽然单节点成本可能较高,但其在简化布线、免中继设备、便于调试维护以及性能提升等方面的综合价值,往往使长期成本更具优势。
I3C这一协议也在发展
I3C是新兴的传感器通讯协议,国外大厂正推动其在机器人灵巧手领域的应用,可省去外部PHY,简化硬件设计。比如,NXP的i.MX RT1180集成2个I3C接口,可连接多个伺服节点与传感器;英飞凌的PSOC Edge支持I3C;瑞萨最新推出的RA8系列高性能MCU中,也均支持了I3C总线;Microchip的PIC18-Q20系列配备了通信速率快的I3C模块;ST的STM32N6、STM32H5、STM32H7、STM32U3均支持I3C。
I3C适配灵巧手多电机控制、高密度传感器数据采集(如电子皮肤、力矩传感器),适合传感器数量多、安装空间受限的场景(如机器人手指)。
目前机器人灵巧手主流仍采用CAN FD,I3C因生态成熟度不足,尚未大规模落地。此外,有工程师认为I3C的方案在抗干扰能力上较差,所以很难在灵巧手上实现规模化落地。
不过,当前技术扔在不断发展和进化之中。一些国产芯片正在讲将I3C纳入研发范畴,未来将根据市场需求推进量产,同时关注CAN XL等新型协议的发展。届时,整个市场将会进一步发生变化。
猜你喜欢
长江通信(600345):长江通信第十届董事会第十七次会议决议
小体积低功耗大能量:红外机芯重塑巡检机器人应用格局

在智能化巡检技术飞速发展的当下,红外机芯凭借其独特的红外热成像能力,成为巡检机器人不可或缺的核心组件。它通过捕捉物体辐射的红外线,将其转化为清晰的热图像并精准测量温度,为巡检工作提供了非接触、全天候、高精度的监测手段。以下将从技术原理、核心...
Tag:机器人移远通信 × 经纬恒润:5G-A车规模组赋能TBox-P平台,引领高阶智驾新跨越

脑启未来 智汇辽宁――2026 WRC世界机器人大赛 BrainAI 脑科学系列赛辽宁省选拔赛正式启动

工厂智能化转型必备:加工产线无人化机器人整体解决方案
